
目前走架细纱机纺纱过程中,其生头环节还需要人工操作,具体为:需要人工手动将毛卷毛卷上的纱线头剥下通过分纱架引入压纱罗拉下后缠绕到纱管上,每个毛卷都是由数十个毛卷组成,每台走架机上有数十个毛卷,工人需要耗费大量的时间和精力来完成走架机这一生头过程。
纺纱工厂及一线操作者迫切希望能够产生一种全面取代人工生头的自动化装置,同时实现集中生头,以实现生产效率及成功率的提升,减少综合成本,保持更高的工作效率。基于存量设备基本架构,我们不断从方案构思到模拟调试,目标开发一种可量产化的生头“机器人”,以降低细纱制程劳动强度。
一种走架细纱机自动生头机器人
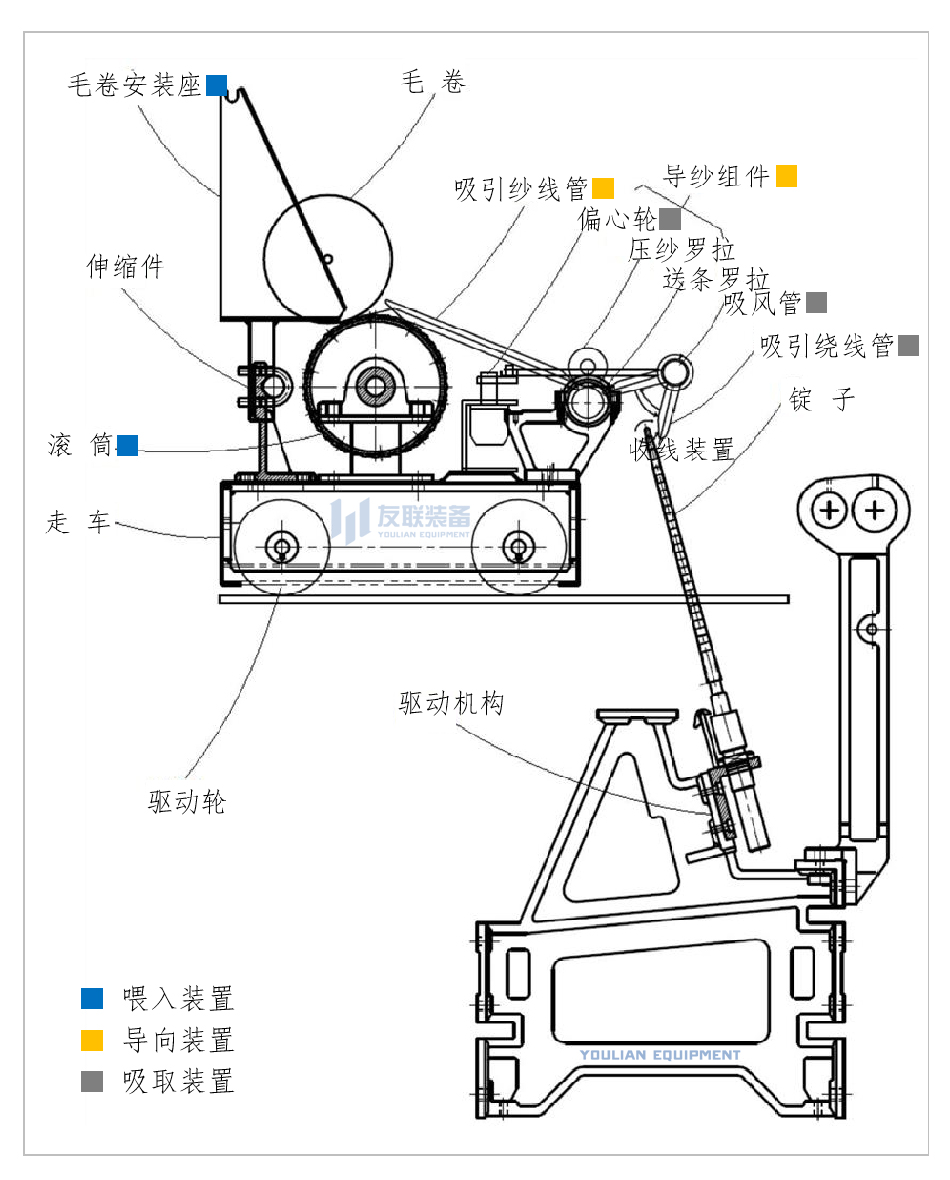
纱线喂入装置:毛卷安装座以及设置在安装座上的若干毛卷,毛卷安装座可拆卸安装在走车上方,毛卷安装座一侧设置有滚筒安装座,滚筒安装座上设置有滚筒。
喂入功能实现:毛卷与滚筒始终相切,能够确保毛卷上纱线在传输时不会出现凌乱的现象。同时,毛卷与滚筒位置相切时送入纱线至吸引纱线管,进一步提高纱线传输的流畅度。
导向装置:设置在第一机械手上的吸引纱线管以及设置在安装底座上的导纱组件,安装底座安装在走车上,导纱组件包括设置在安装底座上的压纱罗拉和送条罗拉,压纱罗拉设置在压纱罗拉送条罗拉的上方。
吸取装置:设置在安装支架上方的偏心轮,偏心轮一端通过吸风管导杆连接在吸风管一端,吸风管上设置若干吸引绕线管,吸引绕线管下方设置收线装置。
吸取功能实现:通过偏心轮和吸风管的配合,使吸风管带动吸引纱线管调整位置,再利用锭子旋转使纱线存绕到锭尖并具有了一定的捻度。将吸引纱线管设置在第一机械手上,能够辅助吸引纱线管作出位置和角度调整,将吸风管设置在第二机械手上,能够辅助吸风管左平移运动,进而确保吸引绕线管与吸引纱线管能够做到同轴线的相对位置,使纱线头准确且快速地缠绕在吸引纱线管头上,进而提高设备的工作效率和工作精度。

 客服:400-993-0950
客服:400-993-0950
 电话:0512-63365510
电话:0512-63365510
 传真:0512-63341238
传真:0512-63341238
 微信:szylfg_public
微信:szylfg_public
 地址:苏州市吴江区太湖新城菀坪社区同安东路39号
地址:苏州市吴江区太湖新城菀坪社区同安东路39号
 扫一扫 关注我们
扫一扫 关注我们